
موتور بیرونی چیست؟
2021-09-07
موتورهای گشتاور بیرونی و درونی
دو نوع درایو مستقیم وجود داردموتورهای گشتاور بدون قاب: پیشی گیر وفراریموتورهای گشتاور در مورد موتور اینرانر، روتور در قسمت داخلی استاتور قرار دارد. در مورد موتور بیرونی، روتور در قسمت بیرونی استاتور قرار دارد.
موتورهای Outrunner در مقایسه با موتورهای Inrunner گشتاور بیشتری را برای همان حجم ساخت تولید می کنند. نوآوری های مغناطیسی در نوع شناسی پیشتاز تخصص دارد. اما هر دو نوع موتورهای گشتاور، که هر کدام مزایای خاص خود را دارند، همچنان به روشی مشابه عمل می کنند.
تفاوت بین موتور بیرونی در مقابل موتور داخلی
یکی از مزیتهای موتورهای خروجی در مقایسه با موتورهای اینرانر این است که سطح شکاف هوا به طور قابلتوجهی بزرگتر است. به عبارت دیگر، سطحی که خطوط میدان الکترومغناطیسی از روتور به استاتور عبور می کنند، بسیار بزرگتر است. به این ترتیب نیروی الکترومکانیکی بیشتری تولید می شود.
علاوه بر این، بازوی گشتاور برای یک موتور پیشران طولانیتر است، زیرا نیرو بیشتر از مرکز چرخش ایجاد میشود. در نتیجه سطح شکاف هوایی بزرگتر و بازوی گشتاور بیشتر هر دو منجر به گشتاور بیشتر می شوند. از این رو، موتورهای خروجی می توانند به سطوح گشتاور بسیار بالاتری نسبت به موتورهای داخلی با حجم ساخت یکسان دست یابند.
برای جبران گشتاور کمتر، موتورهای داخلی اغلب به جعبه دنده یا گیربکس مجهز می شوند. اما افزودن این مکانیک ها منجر به افزایش حجم ساخت و تلفات مکانیکی می شود. علاوه بر این نیاز به نگهداری بیشتری دارد، خطر آلودگی (روغن، گریس) را افزایش می دهد و منجر به دقت کمتری می شود. بنابراین هنگامی که حجم ساخت محدود است و به سطوح گشتاور بالایی نیاز است، موتورهای خروجی بهترین گزینه هستند.
تفاوت های کلیدی â براشلس Inrunner در مقابل موتور Outrunner
به تصویر زیر دقت کنید. می بینید که موتور خروجی بدون جاروبک دارای شفت خروجی است که در این حالت به یک پروانه متصل به جعبه موتور متصل است. این نشان می دهد که شفت موتور هنگام چرخش، جعبه بیرونی موتور را نیز می چرخاند. این دقیقاً همان چیزی است که اتفاق می افتد. آهنرباهای دائمی روی روتور روی روتور قرار می گیرند و روتور روی بدنه بیرونی می چرخد. در قسمت داخلی موتور، سیمپیچهای استاتور قرار دارند که نمیچرخند و در موقعیت خود ثابت هستند.
در موتور اینرانر، شما اساساً خلاف نحوه ساخت آن را دارید. در سمت بیرونی موتور مورد است. مورد در این وضعیت چرخش ندارد و ثابت می شود. سیم پیچ های استاتور در قسمت داخلی کیس قرار می گیرند. هنگامی که شفت موتور یک رانر را میچرخانید، روتور را میچرخانید که حاوی آهنرباهای دائمی است، دقیقاً مانند پیشران. البته تفاوت این است که آنها اکنون در مرکز موتور قرار دارند. برای بیشتر، این نوع معمولی موتور الکتریکی خواهد بود، به خصوص اگر با موتورهای AC بزرگ یا حتی موتورهای DC برس خورده قدیمی آشنا هستید.
تفاوتهای عملکرد â Inrunner بدون برس در مقابل موتور Outrunner
این را می توان به راحتی در مورد اینکه کدام موتور بهترین عملکرد را دارد وقتی به جزئیات مربوط می شود بحث کرد. برای سادگی، بیایید موتورهایی با اندازه و وزن مساوی را در نظر بگیریم تا تفاوتهای عملکردی احتمالی را با هم مقایسه کنیم.
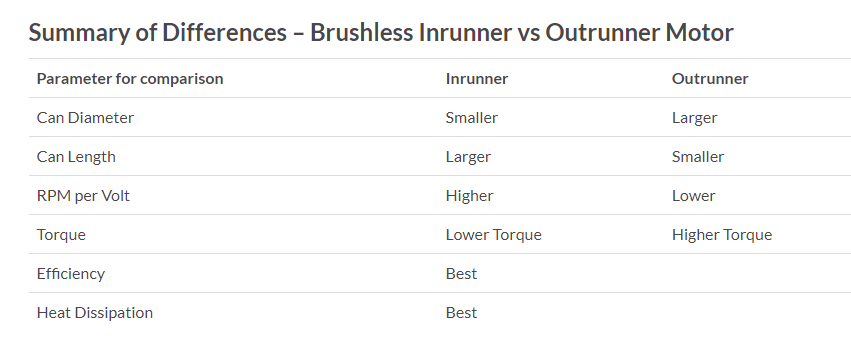
تفاوت اندازه فیزیکی
به طور کلی موتورهای بدون جاروبک دارای قطر بزرگتر و طول کمتری در مقایسه با موتورهای داخلی مشابه با وزن مشابه خواهند بود. برعکس، Inrunnerها از نظر قطر کوچکتر و معمولاً از نظر طول بزرگتر هستند. اندازه فیزیکی یکی از حوزههایی است که ممکن است درخواست شما در آن محدود باشد، با این حال معاوضههای دیگری نیز وجود دارد که باید در نظر گرفته شوند، همانطور که در زیر به آن خواهیم پرداخت.
دور در دقیقه / ولت (Kv)
هنگامی که RPM در هر ولت موتور براشلس را در نظر می گیرید، (سرعت چرخش در هر یک ولت اعمال شده) این یکی از بزرگترین عوامل در انتخاب موتور مناسب برای کاربرد شما است. اغلب مواقعی که موتور Kv مناسب را به درستی انتخاب نمی کنید، خطر سوختن یک جزء سیستم قدرت تا حد زیادی افزایش می یابد. یک موتور داخلی با اندازه یکسان با یک موتور خروجی بدون جاروبک، Kv بالاتری خواهد داشت. اگرچه انتخابهای مختلف بادی موتور (موتورهای هم اندازه با گزینههای Kv) محدوده مناسبی را ارائه میدهند، موتورهای خروجی معمولاً مقدار Kv کمتری دارند. این نکته کلیدی در انتخاب موتور براشلس است که مستقیماً با برنامه شما مطابقت دارد.
چگونه یک پیشرو Kv کمتر تولید می کند؟ خوب، ما قبلاً در مورد تفاوت اندازه فیزیکی صحبت کردیم. اندازه فیزیکی یک عامل اولیه را نشان می دهد که kv را تحت تأثیر قرار می دهد. قطر بزرگتر قوطی بیرونی اجازه می دهد تا مقدار بیشتری از آهنربا در جعبه بیرونی استفاده شود. قطب های مغناطیسی متناوب بیشتر آهنربا، ESC را مجبور می کند با سرعت بیشتری سوئیچ کند و سرعت کلی را کاهش دهد زیرا کار بیشتری باید توسط ESC انجام شود. همچنین می توانید به سادگی به آن نگاه کنید زیرا قطر بزرگتر محیط بزرگتری برای حرکت موتور در یک چرخش ایجاد می کند. قطر قوطی بزرگتر همچنین بازوی لحظه ای بزرگتر را برای یک پیشتاز نشان می دهد که برای موضوع بعدی خوب است.
مقایسه گشتاور یک موتور Outrunner بدون جاروبک در مقابل Inrunner
بازوی لحظه ای بزرگتر که در بالا در مورد آن صحبت کردیم، مستقیماً به گشتاور بیشتری تبدیل می شود. بنابراین موتور بدون جاروبک گشتاور بیشتری را به عنوان یک مقایسه کلی در برابر یک موتور داخلی تولید می کند. این رابطه با این واقعیت مرتبط است که موتورهای پیشی در هر ولت RPM کمتری دارند. رابطه با Kv و گشتاور نسبت معکوس دارند. با افزایش RPM در هر ولت (Kv)، گشتاور موتور کاهش می یابد.



X
We use cookies to offer you a better browsing experience, analyze site traffic and personalize content. By using this site, you agree to our use of cookies.
Privacy Policy